

AHRS-10B 
AHRS-10P 
AHRS-II-P 
OptoAHRS-II
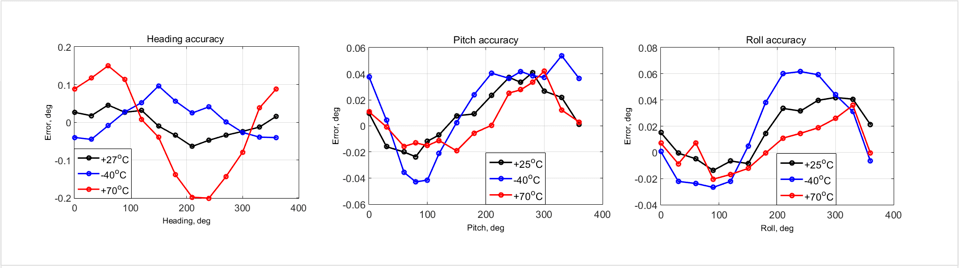
| Heading accuracy | 0.8 deg | 0.3 deg | 0.3 deg | 0.2 deg |
| Pitch & Roll accuracy | 0.2 deg | 0.05 deg | 0.05 deg | 0.05 deg |
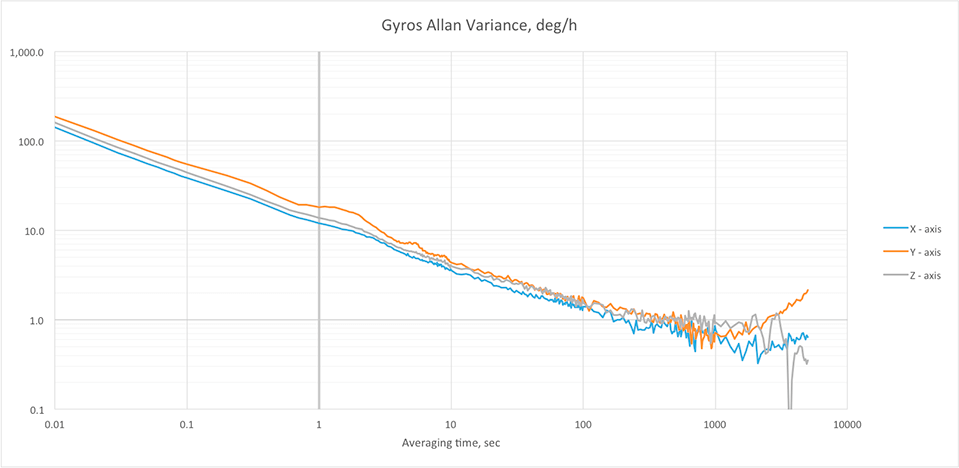
| Gyroscope Bias in-run stability | 8 deg/hr | 1 deg/hr | 1 deg/hr | 1 deg/hr |
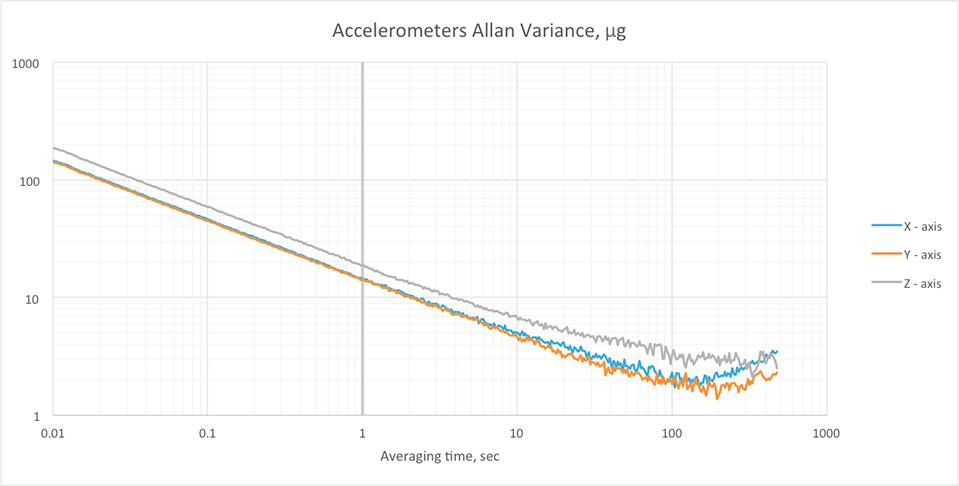
| Accelerometer Bias in-run stability | 0.005 mg | 0.005 mg | 0.005 mg | 0.005 mg |
| Size | 90 × 27 × 26 mm | 90 × 27 × 26 mm | 120 x 50 x 53 mm | 132 x 60 x 47 mm |
| Weight | 77 gram | 84 gram | 280 gram | 600 gram |
Attitude & Heading Reference Systems key performance
Gyroscopes & Accelerometers Bias in-run stability
Heading, Pitch & Roll accuracy
Caractéristiques et fonctionnalités
- State-of-the-art algorithms for different dynamic motions of Vessels, Ships, ROV, UUV, Robots, UAV, UGV, AGV, Gimbals and Antennas
- Highly accurate, sensitive, and temperature stable Fluxgate magnetometers (in-house technology)
- 0.3 deg Gyro-Stabilized Slaved Magnetic Heading and 0.05 deg Pitch & Roll accuracy
- 1 deg/hr gyroscopes Bias in-run stability
- 5 µg accelerometers Bias in-run stability
- Suitable for Primary Attitude Reference and as Motion Control System for marine applications
- Advanced, extendable, embedded Kalman Filter based sensor fusion algorithms
- Embedded 2D and 3D magnetic calibration on hard and soft iron
- RS-232, RS-422, USB and CAN 2.0 interfaces
- Full temperature calibration of all sensing elements
- Up to 200Hz data update rate
- Environmentally sealed (IP67)
- Compact design
L’AHRS (Attitude and Heading Reference System) fusionne les données du gyroscope, de l’accéléromètre et du magnétomètre pour délivrer l’orientation absolue (cap, roulis, tangage).